Sensores Inductivos

Modificación de un campo magnético por presencia de objetos metálicos. Consiste en una bobina situada junto a un imán permanente.
En condiciones estáticas no hay ningún movimiento en las líneas de flujo y no se induce ninguna corriente en la bobina.
Cuando un objeto metálico penetra en el campo del imán o lo abandona, el cambio resultante en las líneas de flujo induce un impulso de corriente, cuya amplitud es proporcional a la velocidad del cambio del flujo.
La forma de onda de la tensión a la salida de la bobina proporciona un medio para detectar la proximidad de un objeto.


Sensores de efecto Hall

Modificación de un campo magnético por presencia de objetos metálicos. El efecto Hall relaciona la tensión entre dos puntos de un material conductor o semiconductor con un campo magnético a través de un material.
Detección por un sensor de efecto Hall en conjunción con un imán permanente.

En ausencia de material el sensor de efecto Hall detecta un campo magnético intenso.
Cuando el material se aproxima al sensor el campo magnético se debilita en el sensor debido a la curvatura de las líneas de campo a través del material.
El efecto Hall se basa en el principio de la fuerza de Lorentz que actúa sobre una partícula cargada que se desplaza a través de un campo magnético:

El sensor se construye con un semiconductor, y la detección se realiza a través del potencial medido entre los extremos del material.
Sensores Capacitivos

Modificación de la capacidad de un condensador por presencia de objetos sólidos.

El elemento sensor es un condensador constituido por un electrodo sensible y un electrodo de referencia separados por un dieléctrico, una cavidad de aire seco para aislar y un conjunto de circuitos electrónicos.

Utilizado como medidor de desplazamiento, se consigue haciendo que el desplazamiento a medir provoque un desplazamiento en algún componente del condensador => cambio en su capacidad.
El elemento capacitativo es parte de un circuito que es excitado de manera continua por una forma de onda sinusoidal de referencia. Un cambio en la capacidad, produce un desplazamiento de fase entre la señal de referencia y una señal obtenida a partir del elemento capacitativo.
El desplazamiento de fase es proporcional al cambio de capacidad, este cambio se utiliza para detección de proximidad.
- La capacidad varía con la distancia a la que está el objeto
- La capacidad depende del material objeto de detección

Sensores de Ultrasonidos
_0.jpg)
Las ondas ultrasónicas tienen la capacidad de que cuando viajan por un medio cualquiera son reflejadas si encuentran en su camino una discontinuidad o algún elemento extraño.
La reflexión de la onda es debida a la diferencia de impedancias acústicas entre el medio y el objeto. El tiempo de espera entre el envío de la onda ultrasónica hasta su recepción se denomina tiempo de eco, y es utilizado para determinar la distancia al objeto.

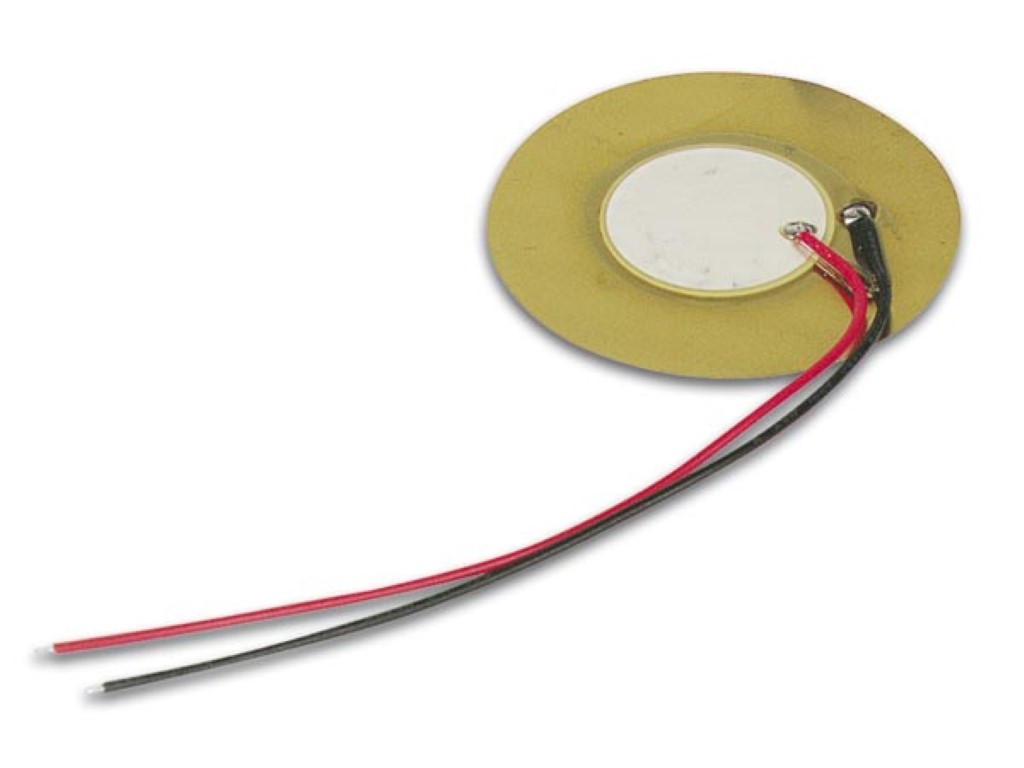
El elemento básico es un transductor electroacústico, de tipo cerámico piezoeléctrico. La capa de resina protege al transductor contra la humedad, polvo y otros factores ambientales.
Absorbedores acústicos, se utilizan para amortiguar rápidamente la energía acústica, para detectar objetos a pequeñas distancias, ya que el mismo transductor se utiliza como emisor y como receptor.
Tienen muchos problemas: ángulo de incidencia de la onda sobre el objeto, temperatura: induce cambios en la densidad del aire => cambio en la velocidad de propagación de la onda, aire, superficie del objeto, distancia mínima detectada, la forma de onda es cónica y solo detecta objetos dentro del
cono del ultrasonido, falsos ecos, etc.

Sensores ópticos de proximidad

Emisor de luz por diodo LED + recepción por un fotodiodo.

Los conos de luz formados enfocando la fuente y el detector en el mismo plano interceptan en un volumen largo.
Este volumen define el campo de operación del sensor, puesto que una superficie reflectora que intercepta ese volumen se ilumina por la fuente y es vista simultáneamente por el receptor.
Sensor con salida binaria: un objeto se detecta cuando se recibe una intensidad de luz superior a un umbral preestablecido.
- Otra posibilidad más sencilla:

Problemas:
- Alineación precisa.
- Alta calidad del emisor: porque la energía se pierde con la distancia.
Sensores de Contacto

Se utilizan para obtener información asociada con el contacto entre la mano manipuladora y objetos en el espacio de trabajo. Dos tipos:
- Binarios: responden a la presencia o ausencia de objetos.
- Analógicos: proporcionan una salida proporcional a la fuerza local.
Sensores Binarios
Informan sobre la presencia de objetos
Ej: Microinterruptor en la mano: este tipo de detección es útil para saber si una pieza está entre los dedos.

Sensores Analógicos

Detectan no sólo la presencia, sino también la fuerza ejercida
Ej: compresión de un muelle en la zona de contacto.
Esta constituido por una varilla accionada por un resorte mecánicamente enlazada con un eje giratorio, de tal manera que el desplazamiento de la varilla debida a una fuerza lateral da lugar a una rotación proporcional al eje.
Se mide la rotación con un potenciómetro, y conociendo la constante del resorte se conoce la fuerza correspondiente a un desplazamiento dado: F = k*x

Ej: Pieles artificiales:
Sensores de presión distribuidos por la superficie de contacto, para obtener una información de contacto más amplia que un único punto.

Las placas de detección exteriores suelen ser dispositivos binarios.
Arrays de detección:
- Sensores binarios múltiples.
- Un array de electrodos en contacto eléctrico con un material conductor dúctil (grafito), cuya resistencia varía como función de la compresión: sensores piezorresistivos.
Cuando un objeto presiona contra la superficie produce deformaciones locales (D) que se miden como variaciones de la resistencia. Esta puede transformarse con facilidad en una señal eléctrica cuya amplitud es proporcional a la fuerza (f) que se aplica en cualquier punto de la superficie. => sensores piezorresistivos:

Sensores piezoeléctricos
Formados por materiales cerámicos o cristales iónicos que generan una pequeña cantidad de energía eléctrica cuando son deformados.
Cuando sobre materiales piezoléctricos (titanio de bario) se aplica una fuerza, las cargas negativas del material se concentran en un lado mientras que el opuesto queda cargado positivamente, produciéndose un voltaje (y también un cambio en su capacitancia).

Detección de fuerza y torsión
Sensor de muñeca:

Se colocan entre la extremidad del brazo robot y el efecto extremo, están constituidas por galgas de deformación que miden las pequeñas deformaciones causadas en la sujeción de la muñeca por efecto de fuerzas exteriores.

Especificaciones de estos sensores:
- Alta rigidez para asegurar que las perturbaciones se amortiguan rápidamente para permitir lecturas exactas en cortos periodos de tiempo.
- Diseño compacto para no restringir el movimiento del manipulador.
- Linealidad.
- Baja histéresis y rozamiento interno.
Sensores infrarrojos

Es un dispositivo electrónico capaz de medir la radiación electromagnética infrarroja de los cuerpos en su campo de visión. Todos los cuerpos reflejan una cierta cantidad de radiación, esta resulta invisible para nuestros ojos pero no para estos aparatos electrónicos,ya que se encuentran en el rango del espectro justo por debajo de la luz visible.
Sensores de vibración

Son generalmente utilizados en casas que se encuentran construidas en zonas sísmicas considerando la importancia que tiene en las mismas el registrar las intensidades de un terremoto o bien, de un sismo cuando el mismo ocurre, de hecho en muchos países del mundo en donde varias ciudades poseen este riesgo, la utilización de sensores de vibraciones en todas la viviendas es básicamente una obligación legal. Resulta importante destacar el hecho de que los sensores de vibración suelen tener la particularidad de ser un sistema de detección muy básica y no posee ninguna otra aplicación más que la de saber la intensidad de un sismo ocurrido, de hecho debemos decir que uno de los avances que se quiere lograr con respecto a los sensores de vibración, es el poder predecir un sismo, pero como bien sabemos, hasta el día de hoy es una tarea casi imposible.
Sensores foto eléctricos

Es un dispositivo electrónico que responde al cambio en la intensidad de la luz. Estos sensores requieren de un componente emisor que genera la luz, y un componente receptor que “ve” la luz generada por el emisor. Todos los diferentes modos de sensado se basan en este principio de funcionamiento. Están diseñados especialmente para la detección, clasificación y posicionado de objetos; la detección de formas, colores y diferencias de superficie, incluso bajo condiciones ambientales extremas.
Los sensores de luz se usan para detectar el nivel de luz y producir una señal de salida representativa respecto a la cantidad de luz detectada. Un sensor de luz incluye un transductor fotoeléctrico para convertir la luz a una señal eléctrica y puede incluir electrónica para condicionamiento de la señal, compensación y formateo de la señal de salida.
El sensor de luz más común es el LDR -Light Dependant Resistor o Resistor dependiente de la luz-.Un LDR es básicamente un resistor que cambia su resistencia cuando cambia la intensidad de la luz.
Sensores ultrasónicos

Suelen utilizarse principalmente para los sistemas de seguridad que se encargan de la detección de intrusos en la distancia, de esta manera estos sensores trabajan enviando una onda de sonido hacia el lugar en el cual se encuentra el supuesto intruso y en el caso de que la misma rebote y que los sensores ultrasónicos reciban el eco de vuelta, entonces las alarmas se dispararan enseguida, dándonos el tiempo suficiente para que llamemos a la policía. Los sensores ultrasónicos son exactamente lo mismo que los sensores de ultrasonido, es decir que funcionan con el mismo mecanismo del oído de murciélago.
Sensores acústicos

Las ondas sonoras se manifiestan por las variaciones de presión y velocidad que ellas generan. En la mayoría de los casos el campo acústico en un punto es el resultado de la superposición de ondas sonoras que han experimentado reflexiones múltiples. Los micrófonos son los sensores que facilitan la conversión de una señal acústica en eléctrica. Se pueden aplicar diversos principios a su realización siendo la más común la combinación de fenómenos mecánico-acústicos y su conversión electromecánica.
No hay comentarios:
Publicar un comentario